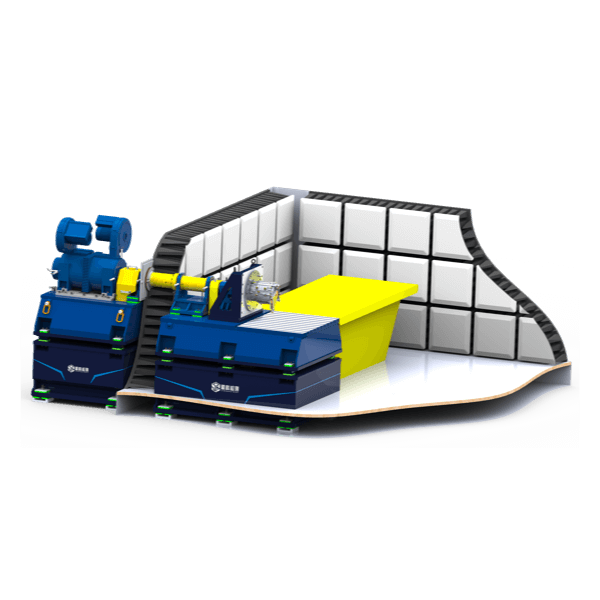
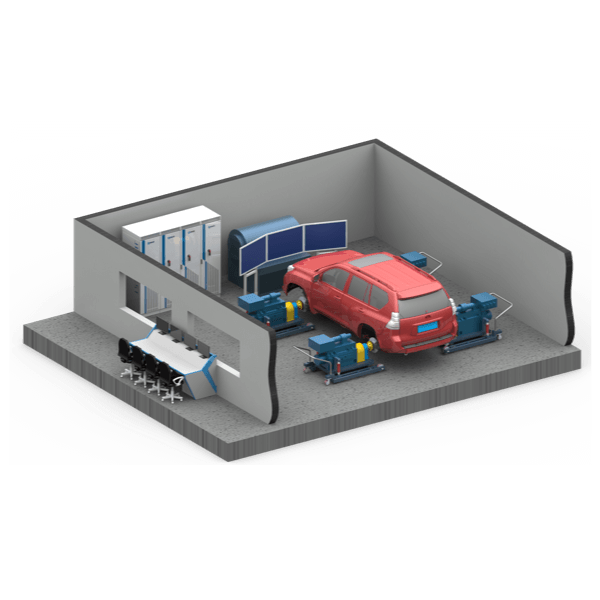
整车EMC/EMI转毂测功机系统一般由电波暗室或混响室,测量仪器,模拟车辆道路负载的EMC转毂测功机系统等部分组成。模拟车辆负载的转毂测功机系统可根据车辆的驱动轴数量设计为两驱、四驱或更多轴驱动的测功机。测功机系统也可采用嵌入到转台中的结构型式,或移动式。
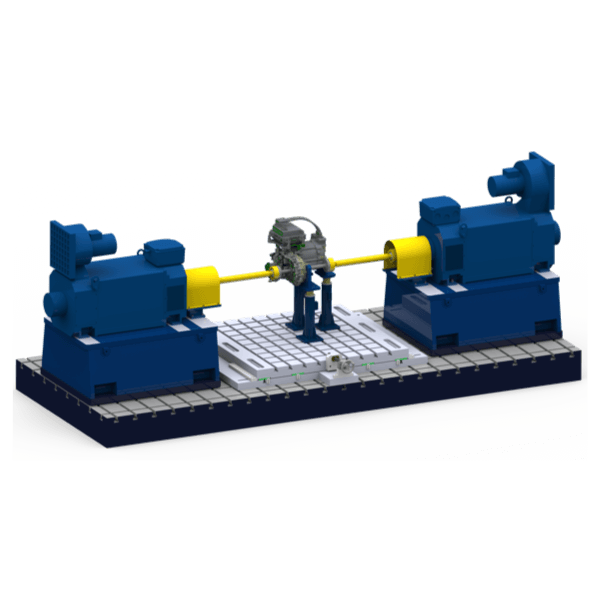
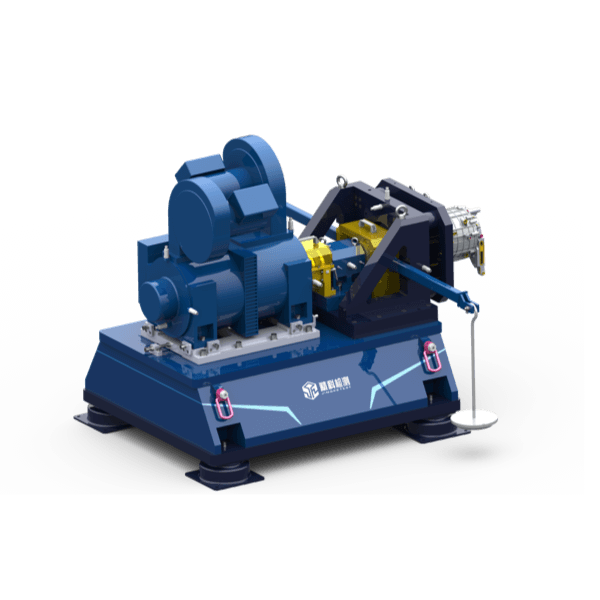
嵌入式EMC测功机系统一般有前后模拟负载的转毂单元和测功机单元组成,转毂单元的间距可调。嵌入式EMC转毂测功机一般嵌入到转台中,可随转台旋转;或嵌入到高架地板中。测试前,根据车辆的轴距,调整测功机的移动轴单元到所需距离,接口将车辆输入到转毂中,通过棘轮束带将车辆前后锁紧,连接好尾气排放管道,即可开始测试。测功机系统具备以下特点:
1. 每台测功机单元均为独立单元,进行模块化装配。
2. 每台测功机单元可进行独立的扭矩或转速控制,模拟道路负载。
3. 可用于电波暗室或混响室的整车测试。
4. 可根据用户需求进行定制设计。
5. 多轴测功机的间距可调,适应不同轴距的车辆测试。
6. 可配置自动驾驶机器人,尾气排放系统,车辆迎风系统等。
7. 采用独特的屏蔽技术,可满足CISPR25的Class5要求。
8. 测功机的扭矩转速控制精度高,重复精度高。
9. 测功机可嵌入到转台中,或高架地板下。
10. 车辆固定装置与测功机本体集成一体,牢固可靠。
11. 具有车辆爆胎检测装置。
12. 具有车辆对中检测装置。
推荐测功机参数:
Type | Prated(kW)/轴 | Frated(N)(b)/轴 | Vmax(km/h) | Vrtated(rpm) | F2(N)@ Vmax/轴 |
ECD-A22-X(a) | 44 | 2153 | 100 | 60 | 1583 |
ECD-B34-X | 68 | 4250 | 100 | 60 | 2231 |
ECD-B74-X | 148 | 6500 | 100 | 60 | 4400 |
a) X—表示测功机的轴数量(如:四驱车辆,一般选用2轴驱动测功机)
b) Frated—表示测功机单个驱动轴牵引力。测功机系统的总体牵引力为测功机的主动轴数乘以单轴的牵引力

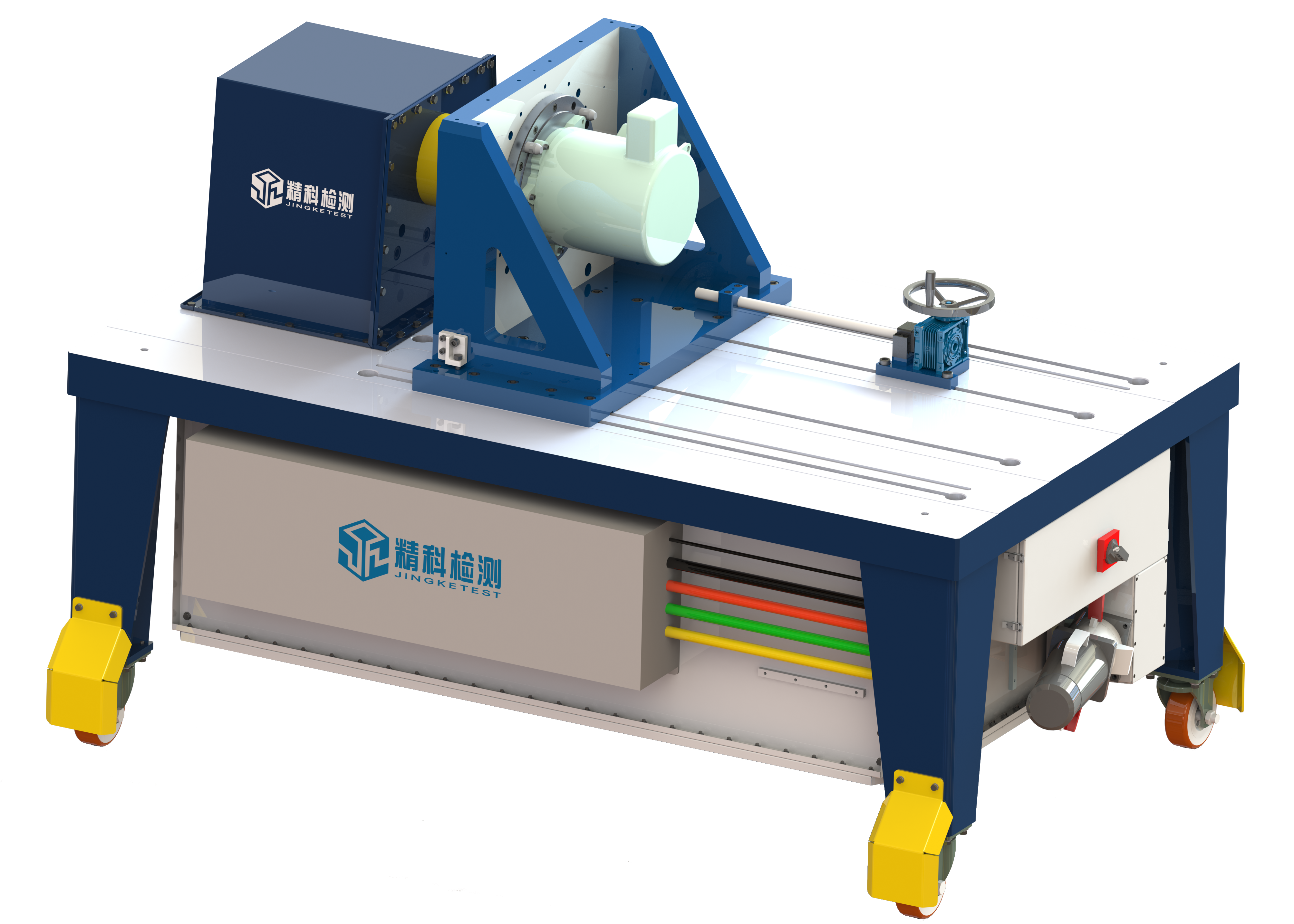
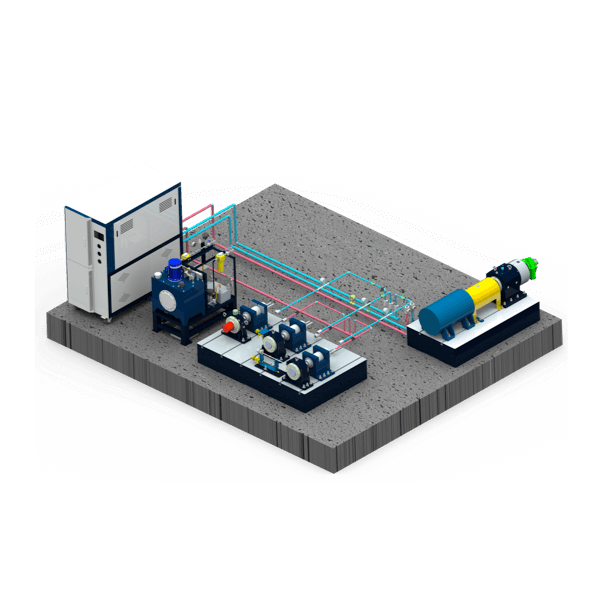
移动式EMC转毂采用模块化结构,底部设计有重载承重万向轮,可以推入到电波暗室内,将可调支架置于支承位置,将车辆驶通过引桥驶入测试位置,连接好动力电缆、通讯光纤,以及气动管路,将车辆驶入底盘测功机上,并通过棘轮束带固定车辆,即可开始试验。
测功机系统具备以下特点:
1. 每台测功机单元均为独立单元,进行模块化装配。
2. 每台测功机单元可进行独立的扭矩或转速控制,模拟道路负载。
3. 可用于电波暗室或混响室的整车测试。
4. 可根据用户需求进行定制设计。
5. 多轴测功机的间距可调,适应不同轴距的车辆测试。
6. 可配置自动驾驶机器人,尾气排放系统,车辆迎风系统等。
7. 采用独特的屏蔽技术,可满足CISPR25的Class5要求。
8. 测功机的扭矩转速控制精度高,重复精度高。
9. 测功机可嵌入到转台中,或高架地板下。
10. 车辆固定装置与测功机本体集成一体,牢固可靠。
11. 具有车辆防过冲装置。
Type | Prated(kW)/轴 | Frated(N)(b)/轴 | Vmax(km/h) | Vrtated(rpm) | F2(N)@ Vmax/轴 | H(mm) |
ECD-A22-X-F | 44 | 2153 | 100 | 60 | 1583 | 420 |
注:
(a) X—表示测功机的轴数量(如:四驱车辆,一般选用2轴驱动测功机)
(b) Frated—表示测功机单个驱动轴牵引力。测功机系统的总体牵引力为测功机的主动轴数乘以单轴的牵引力

安徽省合肥市高新区天湖路15号
0551-62885653
15375424521
公司拥有专门的制造加工基地和售后服务团队,可为合同项目的按时、高质完成以及后续及时、优秀的售后服务提供有力的保障。